

If you were to pass by Gross Hall on any typical Saturday, you could expect to smell the familiar scent of a dozen pies’ worth of Domino’s pizzas wafting from the Foundry. In other words, Duke Robotics was in session! Our engineers could be found scattered across the Foundry, funneling our collective brainpower into designing, …

Update 8/30: We won 4th place journal paper and 8th place overall out of 33 teams! Check out the winners or full scoresheet. In a normal world, we would have been arriving home today after a week of sleepless nights, boatloads of teamwork, and tons of fun in San Diego at RoboSub. But even though …
For the past two years, our club has been working closely with a local FIRST Robotics Competition (FRC) team, Team 6496. We, Vincent Wang and Maverick Chung, have been mentoring and supporting the high school team since our freshman year, teaching them a variety of engineering-related skills by helping with the construction and design process. …
This afternoon, David Miron (our Programming Lead) and I presented at Bethesda Christian Academy’s science week. We were honored to be the conclusion to the 160 elementary and middle school students’ week-long dive into different STEM topics. We introduced them to the field of robotics, showed them various examples of robots all over different industries, …
Read more “Presenting at Bethesda Christian Academy’s Science Week”

We recently wrapped up our brand new intro project, and we couldn’t be happier with how it turned out. Our retention rate was much higher: about 30 out of 70 new members stayed for over a month. And those who stayed felt much more empowered to contribute, joining our subteams with excitement! We will definitely …

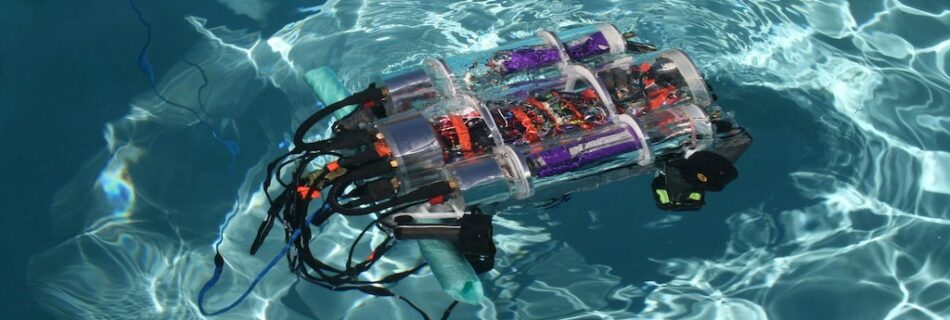
As a freshman, I knew I wanted to join a project team where I could learn engineering skills, take on a complicated design challenge, and build something real. That’s exactly what I’ve been doing in the Duke Robotics Club (DRC). The club’s primary focus is designing, building, and programming an autonomous underwater vehicle (AUV) for …
RoboSub ended a couple of weeks ago, and we had an absolute blast! Eleven of us flew to San Diego for nine days to get Cthulhu, our new robot, up and running in the TRANSDEC. (Click on “Cthulhu” to see our team video and journal paper.) Above: Duke RoboSub 2019 team (from left): Samuel Rabinowitz, …

See our writeup in the 2017 DukEngineer magazine: DukEngineer17 Article

We began our year with Bot Battle as a way to introduce underclassmen to both members of the club and the robotics fundamentals we work with. Partnering with the Innovation Co-Lab, we prepared kits, held office hours, and led workshops covering topics from controls to Arduino basics. In the final tournament, each robot fought in rounds …

In 2016, we hosted the first Bot Battle competition designed to get students excited about autonomous vehicles and robotics. The competition took place from 9/24/16 to 10/2/16. Twelve teams came out and competed- each building an autonomous mobile robot with different strategies for staying alive and taking down rival bots- but there could only be one …
Robosub 2016 has come and gone already. It was a wild ride, and we couldn’t be happier with the way things turned out. Eleven team members flew out to San Diego from across the US, putting their internships and projects on hold for nine days to hack hard, test the bot, and compete at the TRANSDEC. Our team …
We have finally mounted the DVL, fresh back from Teledyne after receiving a tune-up. We are continuing to fine tune the controls in a series of recent pool tests. Next step, finishing up acoustics and testing the system on board.
Last friday we executed our first fully-integrated test. This involved carefully sealings all the pressure hulls, loading up the golf cart with the robot, the support frame, the ethernet reel, buckets of supplies, laptops, and four people. It took us two trips to actually get everything. I think we can actually reduce it to one in the future. In the …
This Friday, we hosted Pratt’s E-Social. This is basically a free-beer-and-pizza that our school helps sponsor every Friday for engineering students. We used it as an opportunity to unveil our new robot for the first time to the community. Reception was positive! Next time: better demo in a swimming pool?



The sub is coming together! We have mounted the horizontal thrusters and attached the pressure hulls to the frame. Mechanical is now working on attaching the hull connectors. We aim to do our first swim test next week and begin tuning our PID controllers.