As the acoustics team continues development this year, the main priority for the hydrophone mount is modularity: the hydrophones may need to be moved around the robot for tests and the mounts may need to be quickly reprinted to accommodate different designs.
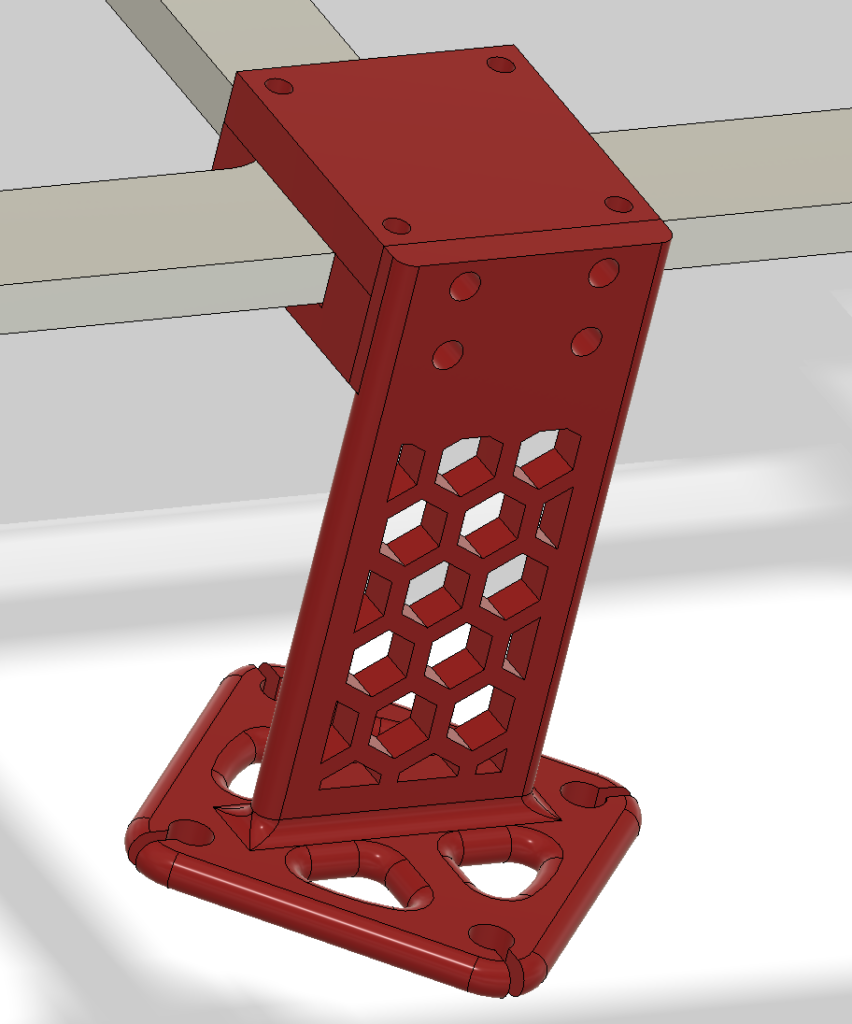
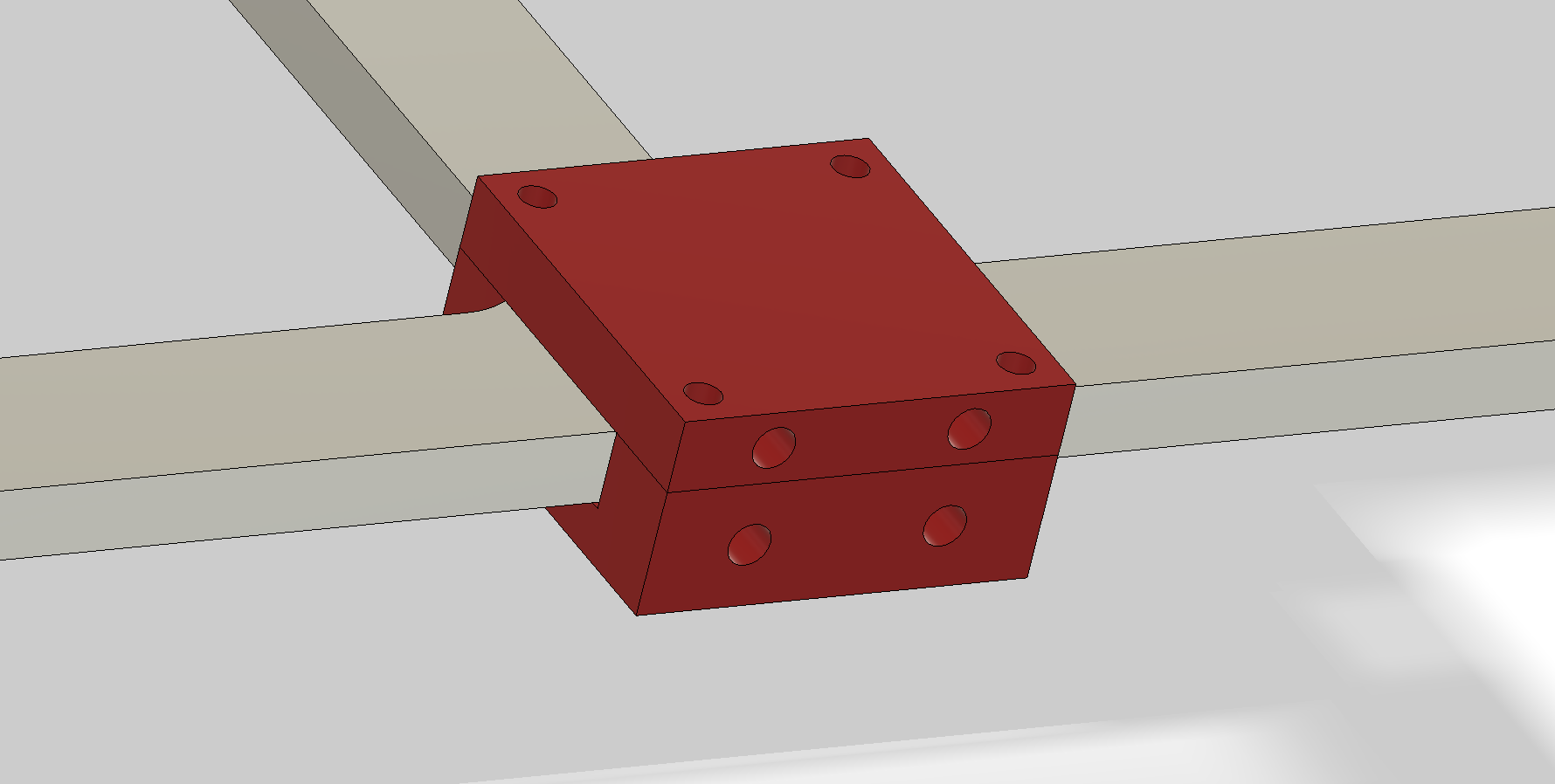
Therefore, the hydrophone mount uses a two-part design. The first part is the frame mount. This 3D print attaches around the frame of the robot and is securely fit around the T-section. However, if needed, this mount will also fit on the rails, although it may not be as secure. This frame mount contains four outwards facing holes that are fitted with brass inserts. These provide an easy way to attach any arbitrary device, as long as it conforms to the standard mounting pattern. Importantly, this means that new iterations of the hydrophone mount (or any other mount, for that matter), can easily be swapped in.
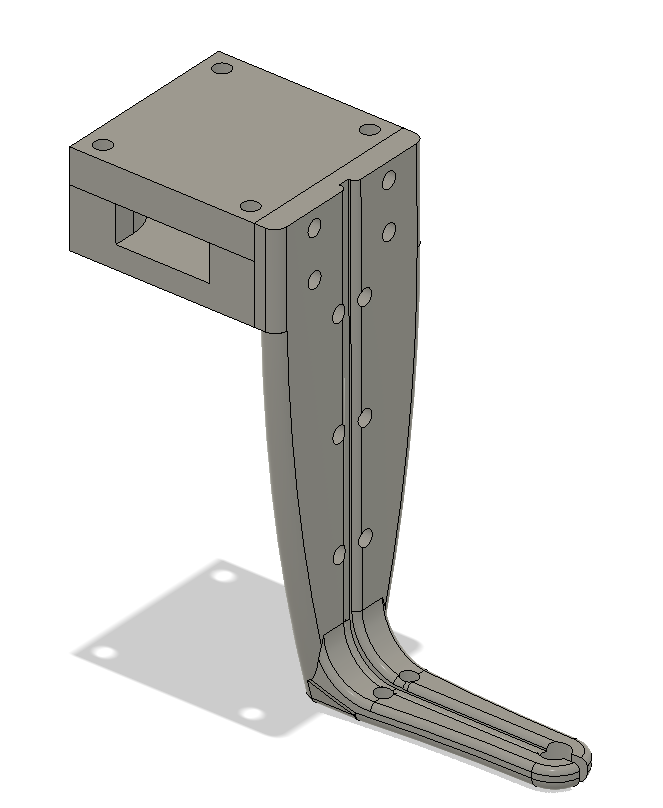
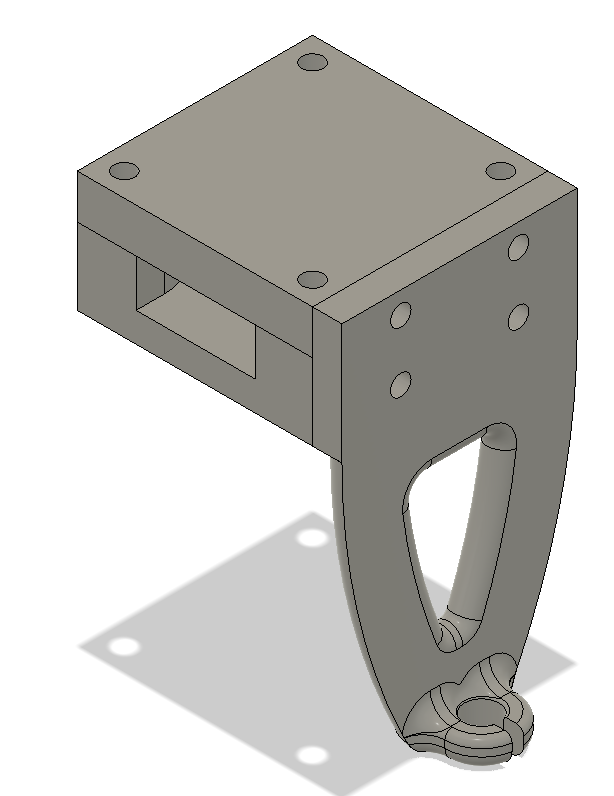
The second part of the mount holds the hydrophones in place. This extends downwards close to the base of the robot to reduce interference with the hydrophones. Moreover, the print uses a hexagonal pattern to reduce its weight and the volume of water it captures when submerged, which keeps the robot’s buoyancy stable.
Originally, this piece only held a single hydrophone, and three of these were mounted across the robot in different spots. However, this didn’t work well during acoustics testing, and we just installed a new design that groups all three hydrophones in a single spot.