The electrical team has hit the ground running this semester! We started with wrapping up some of the projects from last year. The serial thruster code is finally working. After connecting a separate Arduino Mega directly to the ESCs, we realized the issue was either the thruster Arduino, PWM driver, or connections between the two. Eventually, we discovered two main problems: weak connections and incorrect thruster offsets. We split up and tackled the problem from both sides. While one group checked and resoldered connections (several broke during tests), another tested different offsets. Eventually, we met in the middle and got all five tones and a spinning thruster.
The offboard comms team has also made some good refactoring progress and is about one meeting away from being ready to pool test. After the issues controlling the robot from the last pool test, we’ve decided to rewrite the serial communication system entirely. Instead of using the built-in serial methods in C++, we made the call to transition to Python and create an extra ROS node just for communicating with the thrusters via serial.
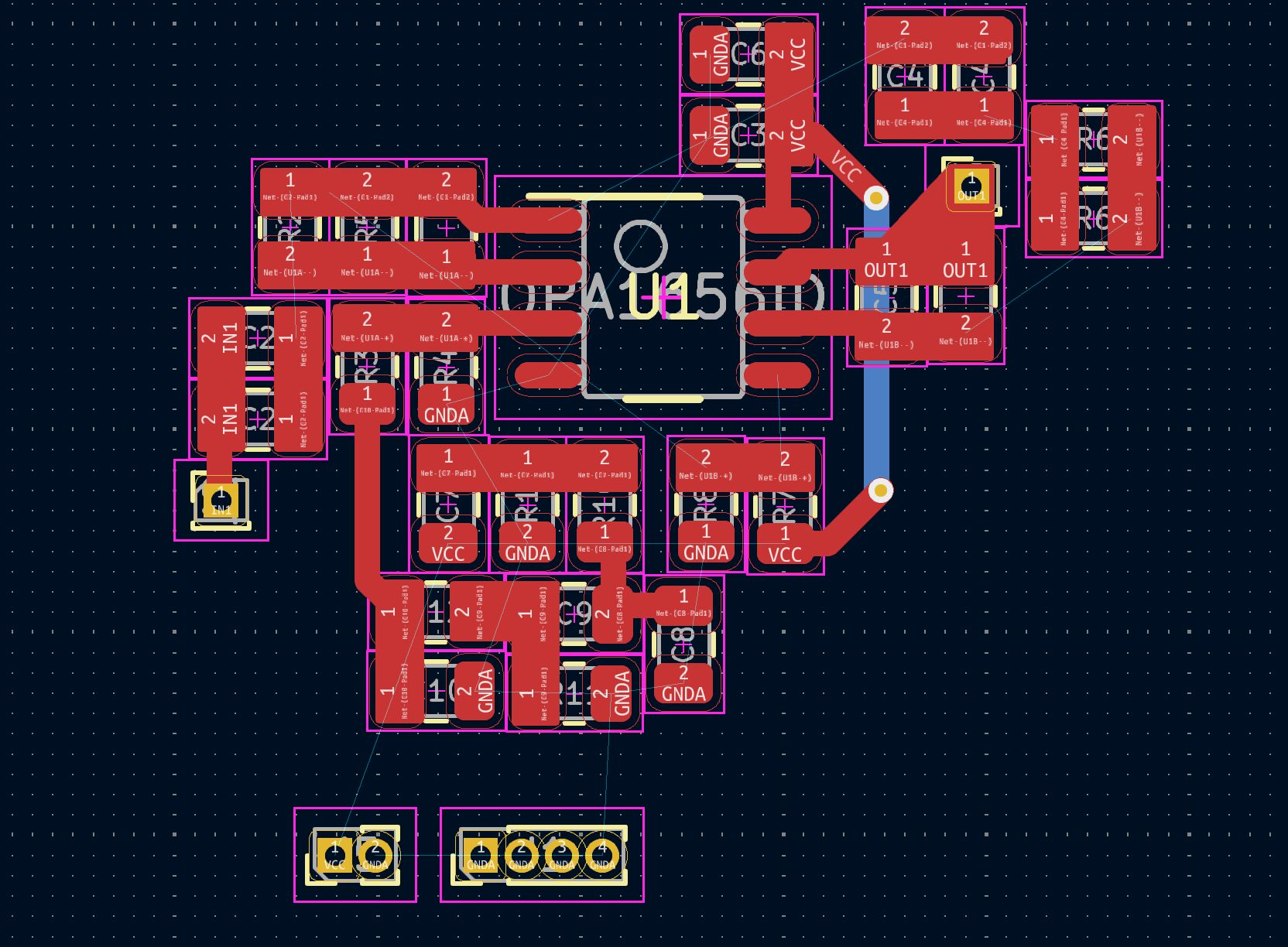
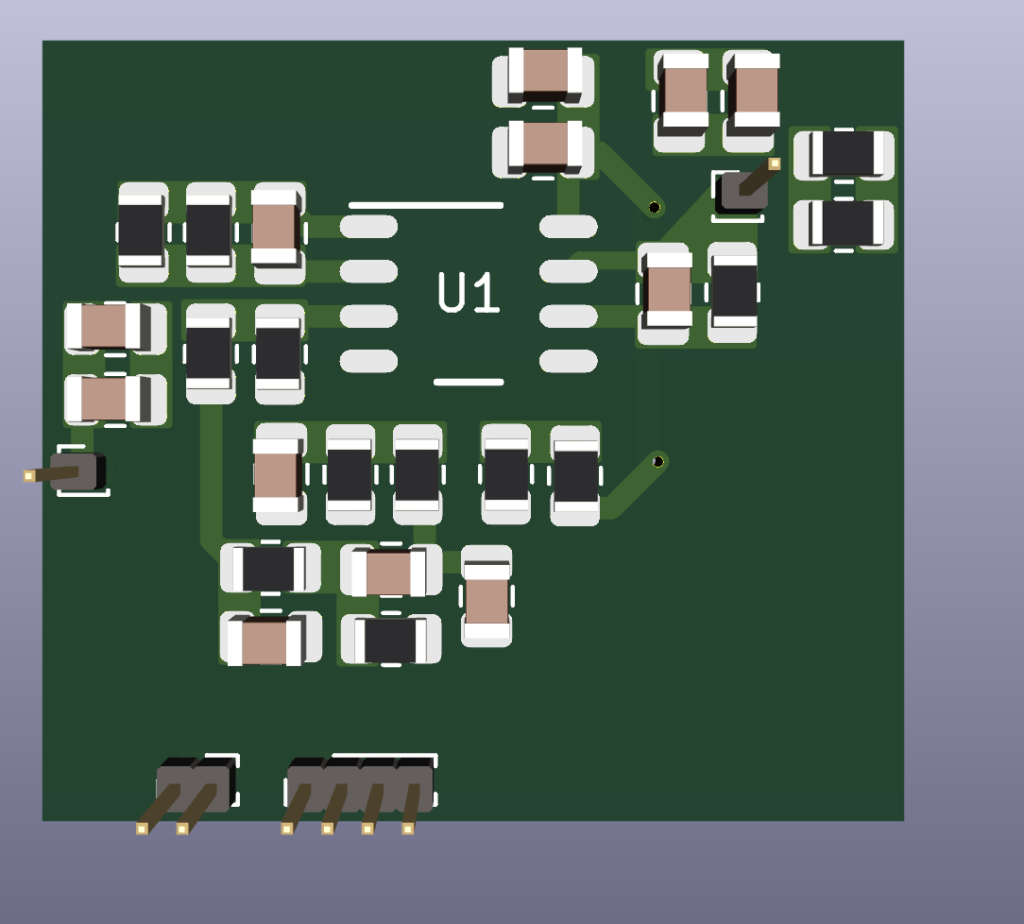
A few of our returning members and many of our new ones have taken on the daunting challenge of acoustics. They decided to do a ground-up re-design, learning from our past attempts. Instead of four tightly clustered hydrophones requiring a complex algorithm and extremely clean signals, we have switched to placing one hydrophone on each side of the robot. Our algorithm will be as simple as “move in the direction of which the hydrophone heard the ping first.” This alone would not allow us to locate the pinger accurately, so we are using this algorithm to get us close enough so our cameras can see it. To get the clear signals required for this approach, the team is reusing the 4th-order custom bandpass filter in the previous iteration. One of our new members designed the custom PCB, which she is currently putting the final touches on.
Looking forward, we’ve placed orders for a DVL and Waterlink modem. The modem will be used for intervehicle communication. We are preparing both electrical stacks so the parts can be integrated as soon as they arrive.