Minibot


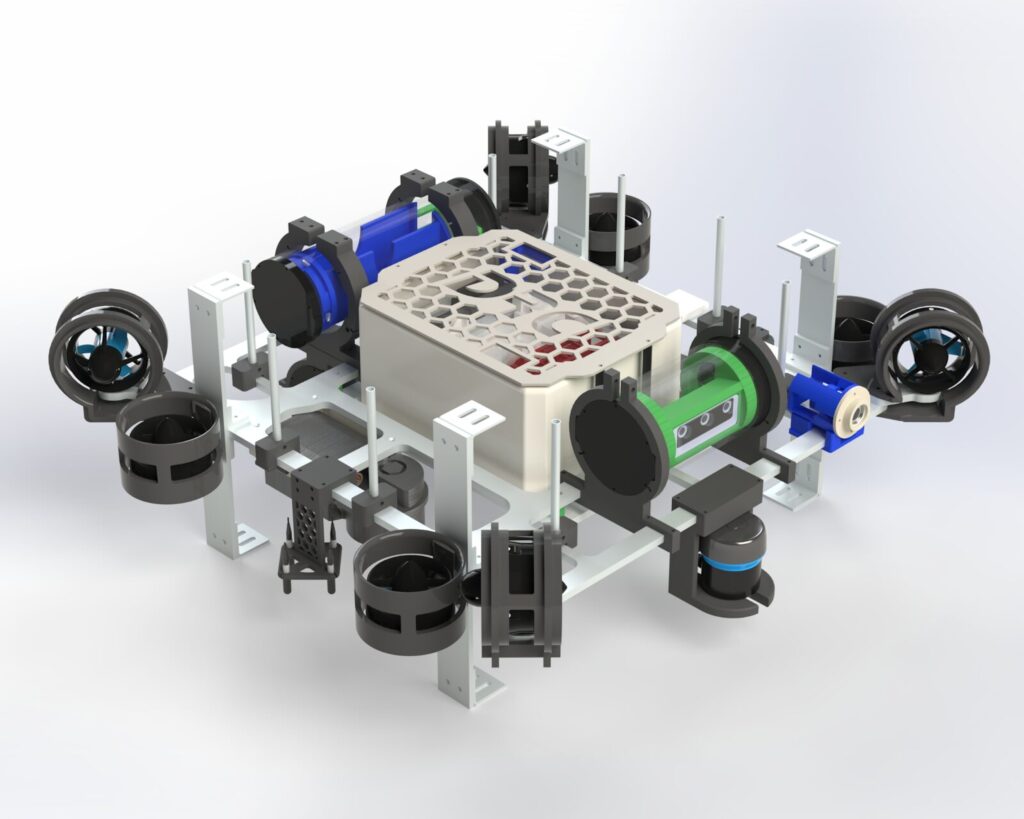
This week, we reached a major milestone by completing the chassis for our minibot, Crush. With the structure in place, we’re now shifting focus to refining smaller but essential details. We are waiting on one more part to arrive but have been able to substitute a 3D print in the meantime. Danny has been making steady progress on the mono camera housing, with the press-fit design nearing its final iteration. Attention is also being given to cable management and other minor adjustments. Meanwhile, the inner capsule stack for the signal capsule is nearly finalized, and we’re beginning to focus on designing the power capsule stack. We are also beginning research into a potential casing to cover the capsules and ensure equal drag even if some components change in the future.
Torpedos
Raine has completed an initial draft of the torpedo release mechanism, which operates through a rotating release. While testing, we encountered some path deviation issues that we aim to resolve through material and final design adjustments. Our goal is to have this system ready and implemented with the ability to fire two for the next pool test. Additionally, we are continuing work on self-propelled torpedoes to develop an alternative system that could achieve greater range and potentially improved accuracy. For now, we’re moving forward with Raine’s design while iterating on these improvements.
Oogway
Michelle has been working on a marker dropper, now redesigned to use a smaller servo. This change allows us to repurpose the previously used servo for the torpedo system, optimizing our available resources.