New Project! Custom PCBs for the Electrical Stack
As you’ll read about in the next few sections, many of our challenges come from wiring messes and broken boards. What’s the fix? Consolidate our hardware stack onto a set of in-house PCBs that can easily connect and are hot-swappable. This should be a great opportunity for the team to dive into circuit design and gain familiarity with reading datasheets and using design software like KiCad.
In advance of our parts arriving, we’ve held an informal workshop on SMD Soldering. The project should quickly ramp up, so expect updates soon!
Crush Changes
Through the past 6 months and more recently at Comp, Crush has had a number of its ESCs break, ranging in reason from overheating to wires being cut while repairing other parts of the robot. Because of the rushed nature of competition week, we could not extract the broken ones and were only able to add replacements.
Given that background, this week, electrical made it a priority to clean up not only the e-junk that had accrued, but also the wiring in general on both of Crush’s capsules. We’ve now completed much of this, with only some cable management in the signal capsule remaining.
In more exciting news, Crush now has EIGHT thrusters, this is up from 6-7 a week ago. To accommodate these changes, we’ve added two additional ESCs and are in the process of routing the cables for the new thrusters into the capsule. From a software standpoint, last year’s changes to offboard communications should allow us to use the new thrusters out of the box, with just an update to the Crush config file.
Oogway Changes
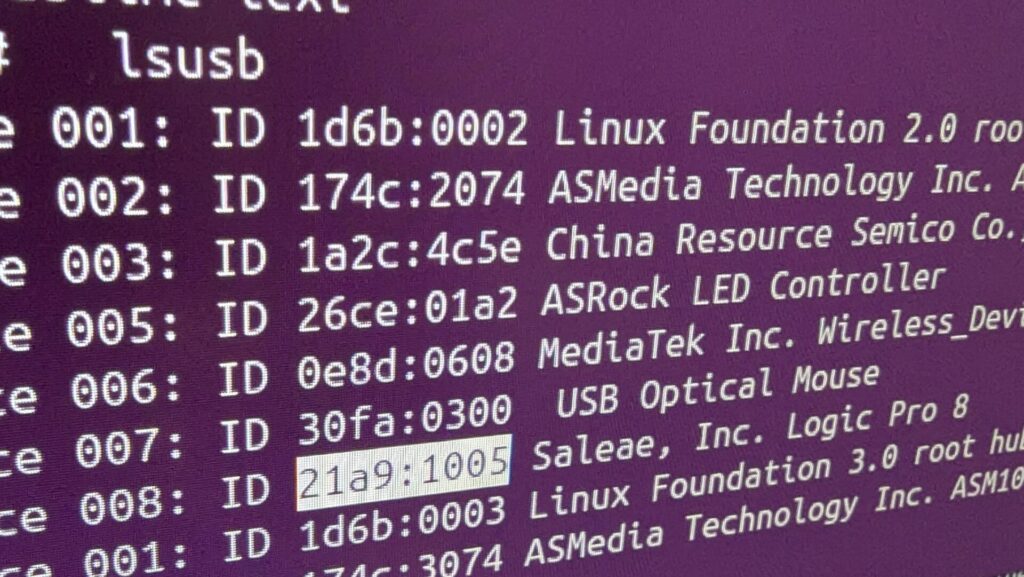
Oogway is being fit with a Saleae logic analyzer that will help the Acoustics team collect better data from pool tests. The greatest challenge has been having the robot actually identify the Saleae as a valid serial device with an associated FTDI string. Our offboard communications package relies on these identifiers in order to correctly collect and route data from sensors, so ensuring the computer can detect the device will be a high priority for the upcoming week.
As always, reliability is a challenge with Oogway, as sensors that seemingly worked in the Foundry mysteriously disappear after a short walk through the jungles behind Gross hall on the way to pool tests. This will continue to be a Sisyphean battle.

Other Updates
Stack on a Board, which had been placed on pause at about 85% completion, can finally proceed, as our Jetson Orin Nano has been flashed and enabled for SSH. It’ll now be a good exercise in setting up a new “robot” within our code base.
We had the pleasure of presenting our robots to the community this Sunday at Cameron Indoor Stadium during the Duke WBB game. Thank you to the team for inviting us out!
