PCB Development
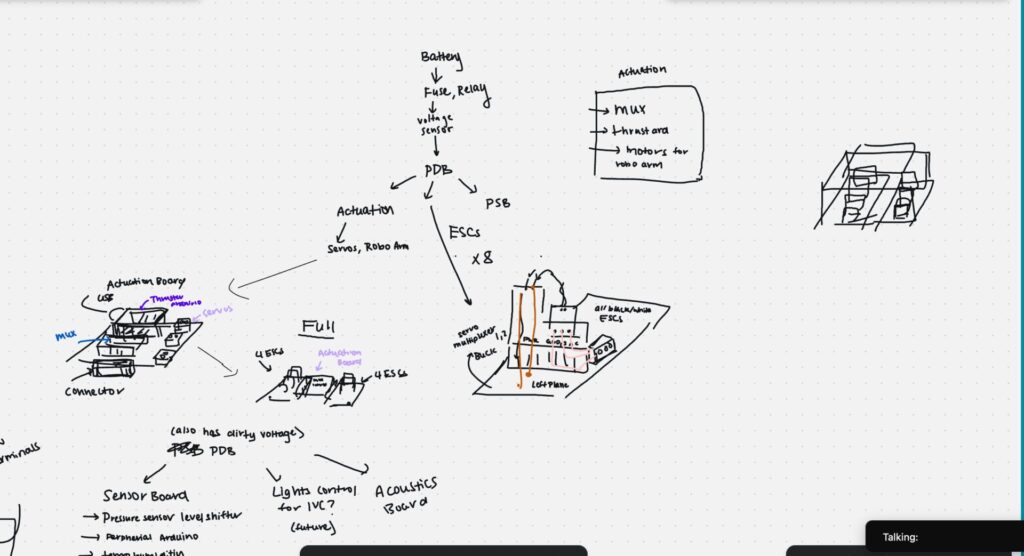
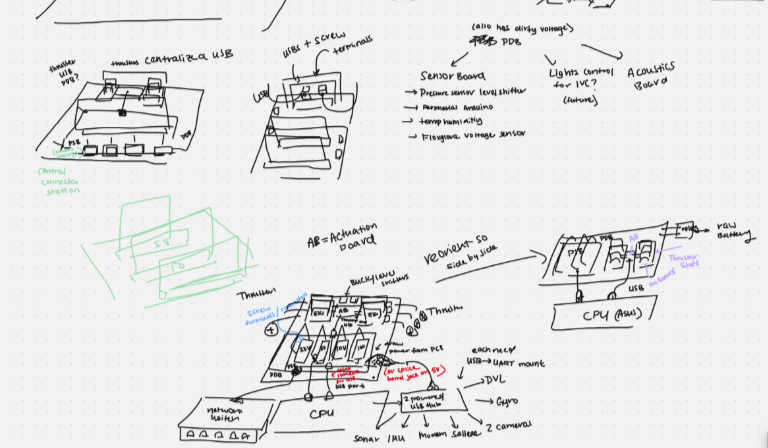
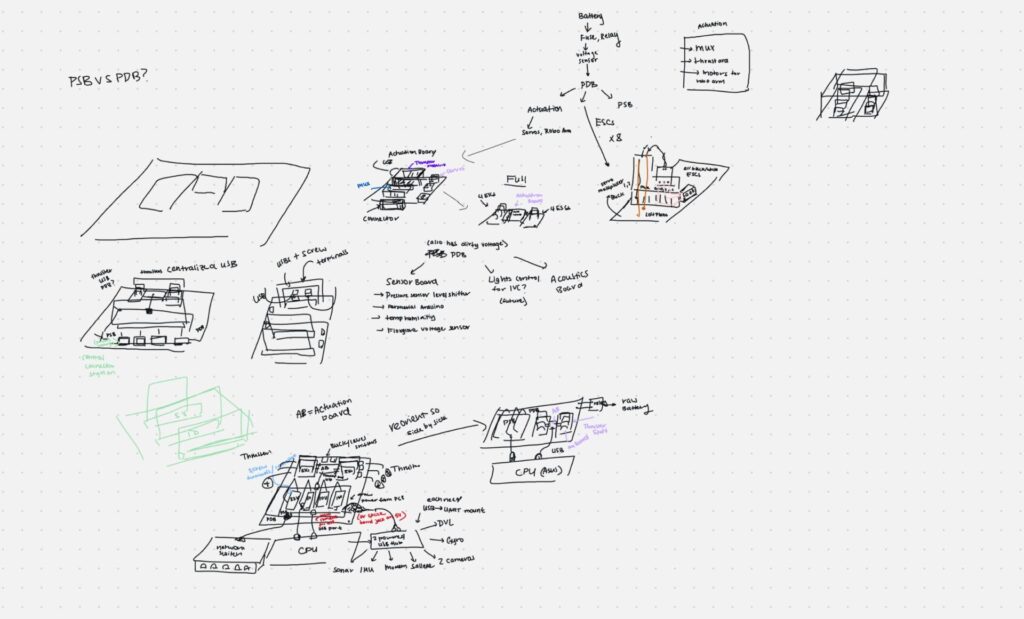
We’ve tried so hard, and we’ve gotten incredibly far! Over the course of the past month, we’ve rapidly worked to finalize our list of components, begin ordering larger parts for preliminary testing, and laying out initial PCB designs. The following diagrams describe our overall architecture and describe the various boards currently being designed, courtesy of our in-house artist, Isabella:
Acoustics
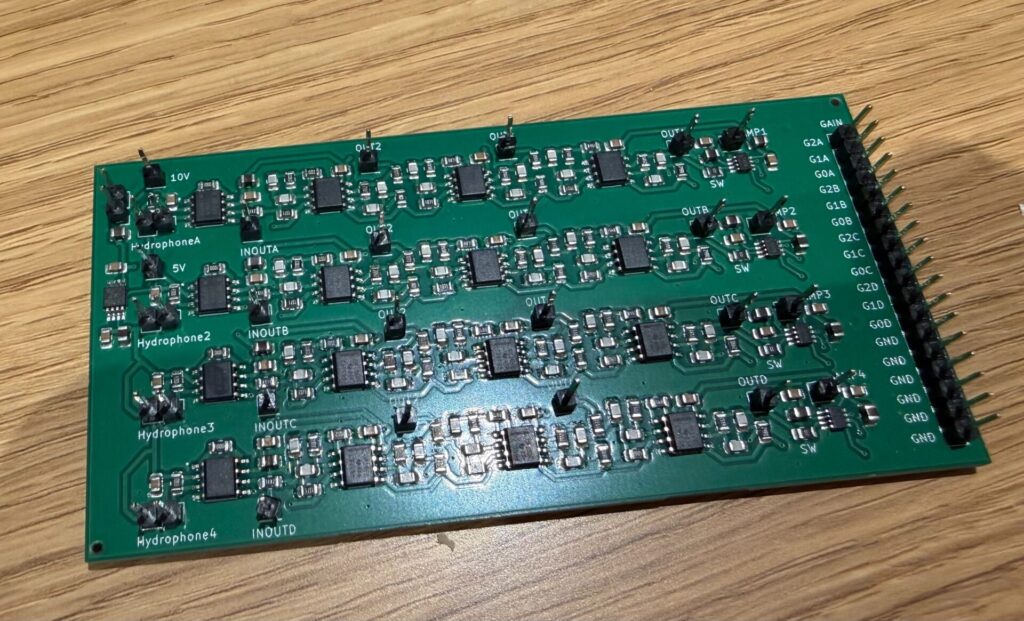
At the beginning of this semester, we fully assembled our custom filtering PCB for acoustics and have it mounted on Oogway robot. The PCB takes each hydrophone signal and passes it through an instrumentation amplifier, then a 12th order active bandpass filter, as well as a variable gain amplifier to provide a clean signal for software to interpret.
Now we are collecting acoustics data in our pool tests to fine tune the gain on our amplifiers and get datasets to improve our neural network that determines which hydrophone receives the ping first. We are also planing to add a I2C expander and transistor array so our robot can control the pins to the variable gain amplifier.
Unfortunately, a rather uncharacteristic winter here in Durham, NC has acted as a foil to our pool testing plans, though we expect to double our frequency of tests with a vigor never seen since club founding once the snow melts.
General Fixes
Although the reconfiguration of Crush, our mini-robot, with 2 additional thrusters seemingly worked, in recent weeks, ensuring that all 8 thrusters were working and moving accurately has become a rather expensive and cumbersome game of whack-a-mole. After much drama and a few, subdued crashouts from various members of the team, though primarily supplied by the author, we seem to have arrived at the cause: Insecure wire-to-wire terminal connections. In the process, we’ve also replaced our previous 16-pin PWM Driver, which acts as a demux for our thruster allocations, though this was unlikely to be the cause.
In the previous year, our Intervehicle Communication logs indicated our robots had been speaking to each other since the dawn of time (Unix Epoch). The additional CMOS battery should allow the bots to remember time, bringing them to the present day, so we can see what they’re plotting.