
It’s been a busy few weeks in the lab as we juggle midterms and dysfunctional robots, but here we still are as we dive deep into the R&D for our newest project. From custom sonar mounts to CNC aluminum hulls, here is the latest from the mechanical team.
Crush
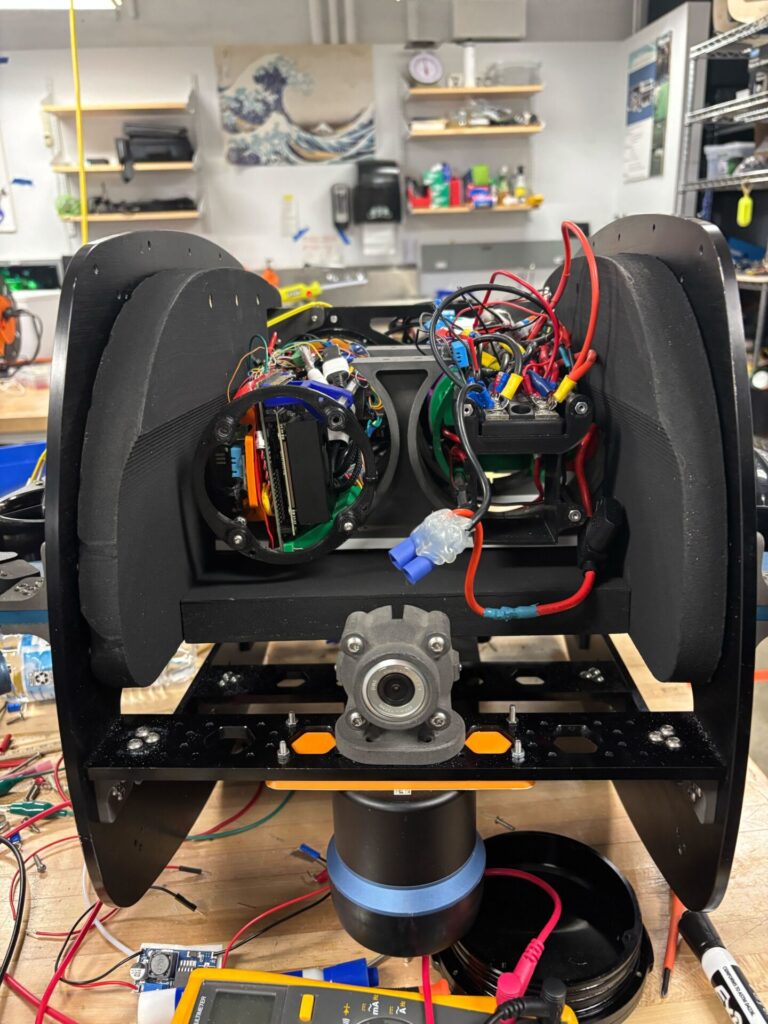
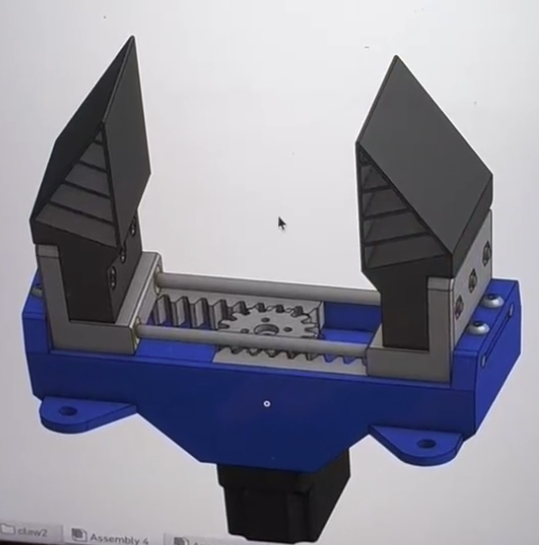
We have created a new sonar mount that protects the bottom of the sonar, so we prevent any damages to the expensive component when the robot rocks forward. In addition, we have continued experimenting with different gripper designs, now looking into a 2 axis gripper design that allows a larger error in robot placement and a simple parallel gripper design.
The newly machined buoyancy blocks have been painted black for a sleek look and mounted to the robot; however some small edits have to be made due to interference with screws and inconsistencies machining tolerances. This coincided with the issue of the power wires from the bus bar sticking out and preventing us from putting on the acrylic capsules, preventing us from testing Crush in the pool.
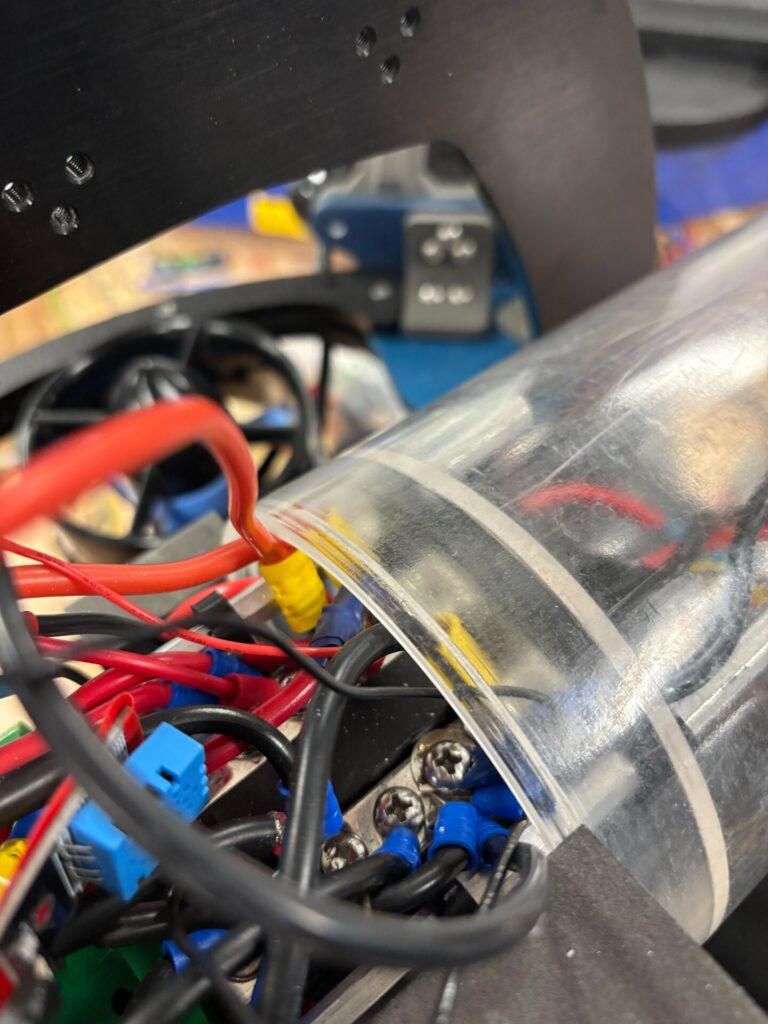
Oogway
The water intake in the battery capsule is getting worse, so we have to investigate where the leak is coming from as soon as possible to prevent any shorts from occurring. There are also slight bubbles coming from the mini sonar cable we have exposed, so we will be gluing the cable just in case that is cause of any additional water intake. Besides that, the robot itself is holding up and pushing through the age.


New Robot R&D
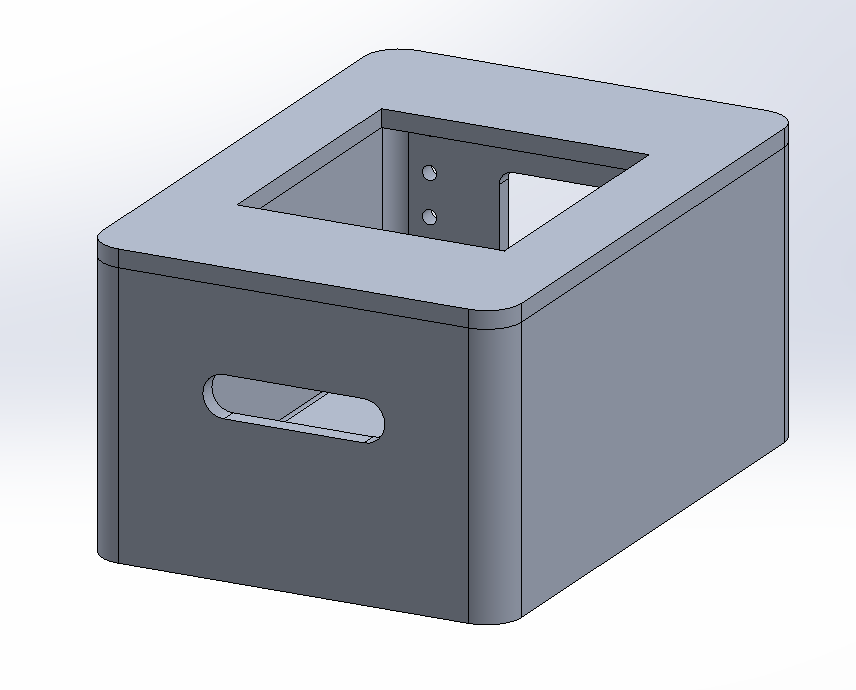
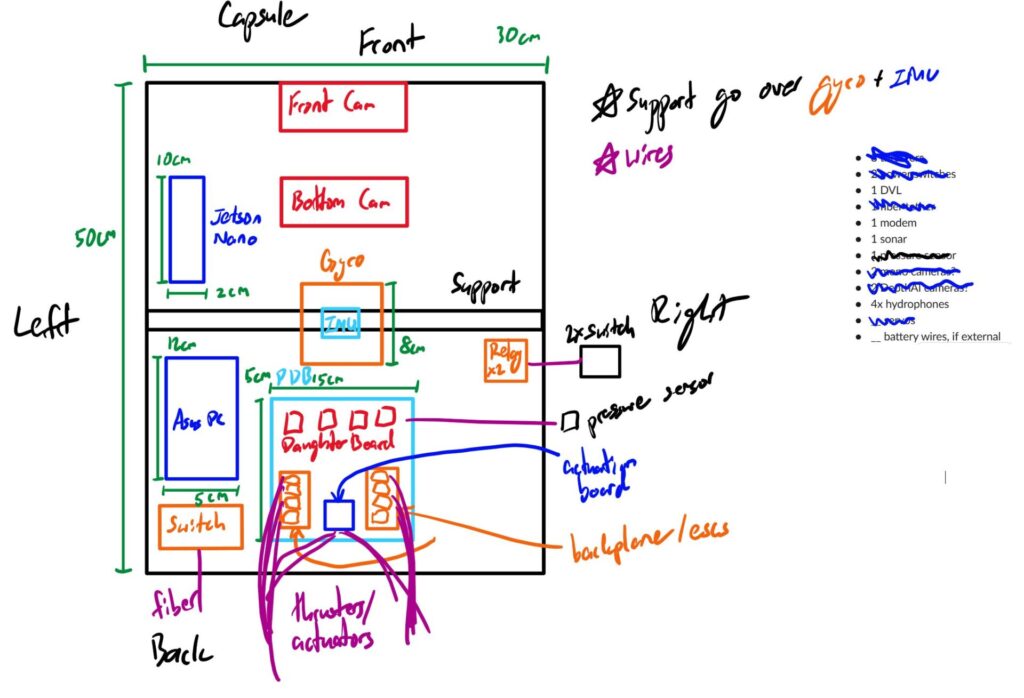
Now we get to the super interesting stuff with new robot designing in full swing! We plan for a single rectangular hull manufactured by CNC milling aluminum due to the rectangular shapes of our electrical component and lessons learned from Oogway. The hull design is currently being refined to be lightweight and functional while working at pool depths and preserving structural integrity using Solidworks FEA as shown. This new hull will utilize penetrators similar to Crush, with port locations still being decided on based on a preliminary sketch of the new PCBs that we will integrate. Additional tasks include research O-ring groove design for a water-tight seal, lid design, outer frame mounting, and much more are in progress.
We aim to finish buoyancy and get the marker dropper to work by the next pool test, so Crush’s main systems can be tested after being out of service for more than a semester. The mech team also aims to complete their design tasks by next week and iterate on their designs as other considerations arise.
Shout Out to the GOAT Alysa Liu for winning GOLD in Olympic Figure Skating 😀