Skip to content
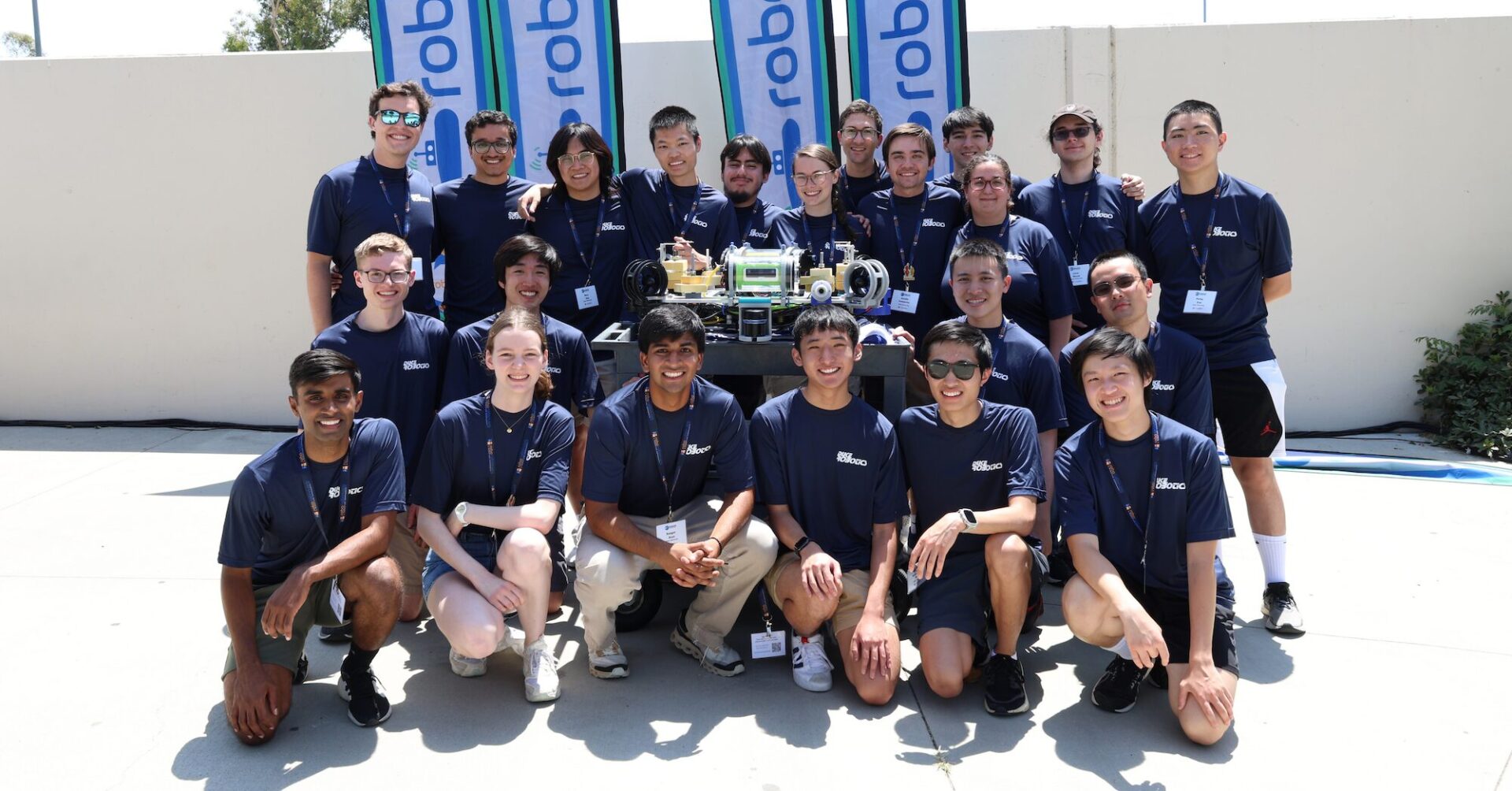
 Team at RoboSub 2024
Team at RoboSub 2024
Executive Board

Lilly Chiavetta
Co-President
Biomedical Engineering & Electrical and Computer Engineering
2025

Michael Bryant
Co-President
Electrical and Computer Engineering & Computer Science
2025
Will Denton
Co-President
Electrical and Computer Engineering & Computer Science
2025
Austin Camacho
Treasurer
Mechanical Engineering
2025
Computer Science

Nathanael Ren
Computer Science Member
Electrical and Computer Engineering & Computer Science & Mathematics
2027
Electrical
Mechanical
Kaelyn Pieter
Mechanical Member
Mechanical Engineering
2025
Jackie Ong
Mechanical Member
Mechanical Engineering
2026
Saagar Arya
Mechanical Member
Electrical and Computer Engineering & Computer Science
2027
Advisors
Copyright © 2025 Duke Robotics Club. All Rights Reserved.