Last friday we executed our first fully-integrated test. This involved carefully sealings all the pressure hulls, loading up the golf cart with the robot, the support frame, the ethernet reel, buckets of supplies, laptops, and four people. It took us two trips to actually get everything. I think we can actually reduce it to one in the future.
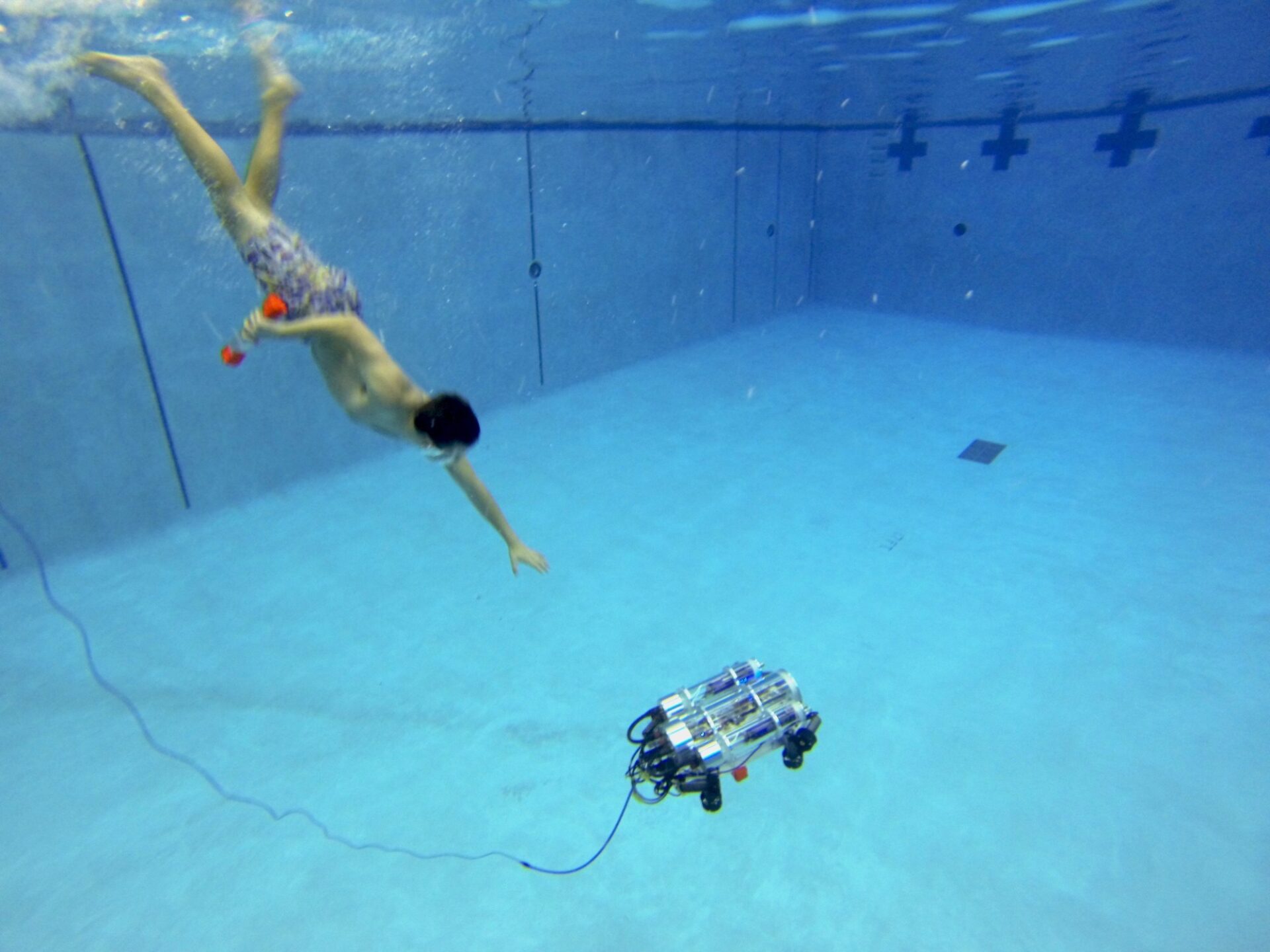
In the pool, we used the frame with extended rails to lower the robot in. This was the first time the robot had been in the water entirely (minus a key 10-lb instrument) so we had to ballast it manually with 1.5 and 5lb masses and zip ties. We got it to a point where it was basically 1% buoyant, per competition rules.
In the water, we had problems communicating with the thruster controller due to some kind of intermittent interference. We will need to debug in lab!