If you were to pass by Gross Hall on any typical Saturday, you could expect to smell the familiar scent of a dozen pies’ worth of Domino’s pizzas wafting from the Foundry. In other words, Duke Robotics was in session! Our engineers could be found scattered across the Foundry, funneling our collective brainpower into designing, programming, and building our beloved autonomous underwater vehicle, Cthulhu.
Those days are a distant, fond memory. Did someone say Zoom? For the entirety of our 2020-21 campaign, Duke Robotics Club, like just about every other organization on planet Earth, has been relegated to a virtual-first paradigm. The school year has been replete with uncertainty and challenges, but we persevered and made it through (and spoiler alert, we have an award or two to show for our hard work). If nothing else, the pandemic has strengthened our conviction in our ability to execute, adapt, and deliver results, regardless of what the world throws at us.
Throughout the school year, we tried our best to maintain a semblance of normalcy within the club. We still “met” virtually twice a week, for 2 hours per meeting. At first, Zoom Robotics took some getting used to. But we adapted quickly, thanks in large part to the leadership of our team leads, Trevor (Mechanical), Muthu (Electrical), and Shaan (Software).
In September, our primary focus was to get new members up to speed via virtual-friendly onboarding projects. After a successful month of onboarding, our focus shifted to building a competition-ready AUV for Robosub 2021 (which, at this point, we were still expecting to be held in person in the summer). It was full steam ahead for us, as there was a surprisingly substantial amount of virtual work to be done on all engineering fronts. Some key achievements include:
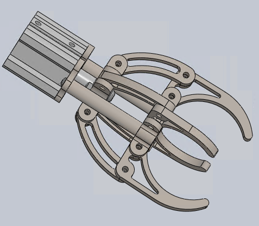
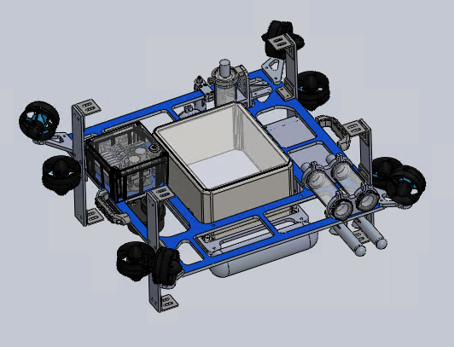
Mechanical: designing a brand-new robot frame whose wide, flat design makes it significantly easier to swap in/out electrical components as well as maneuver in the pool; modelling pneumatic-based actuators (e.g. claw, torpedo launchers) which are safer and easier to debug than their electrical counterparts.
Electrical: revamping our acoustics stack to accurately triangulate the position of underwater pingers; integrating low-level device code to interface with a bevy of new sensors (cameras, pressure sensor, servos); building CI/CD pipelines to facilitate the deployment/testing process for new software features.
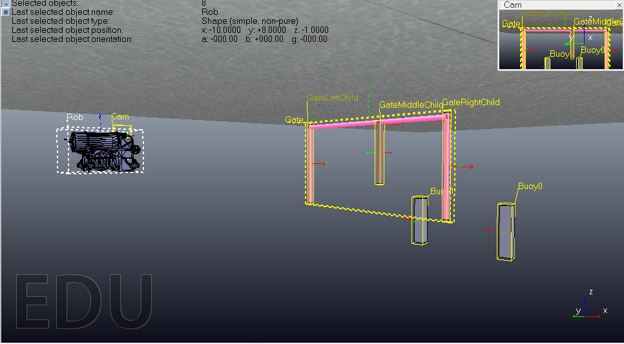
Software: (Computer Vision) developing stereo vision algorithms which calculate the distance between our robot and an object in its field of view; (Controls) revamping cascaded PID control loops to allow for granular control of our robot’s movement; (Task Planning) designing modular low-level “task building blocks” which can be combined to achieve high-level competition tasks; (Simulation) rewriting our platform in C as well as integrating mock computer vision.
Phew, that was a mouthful. It certainly wasn’t easy to get all this done. Limited access to our Foundry lab as well as the inability to conduct pool tests at the Duke aquatics pavilion hindered our ability to test our designs. Furthermore, Zoom is exhausting, and it was often hard to find the motivation to continue working on the robot (especially after the in-person competition was canceled in March 2021). It’s a testament to the talent and commitment of each and every one of our members that we were not only able to survive as a club, but also continue our momentum from previous years.
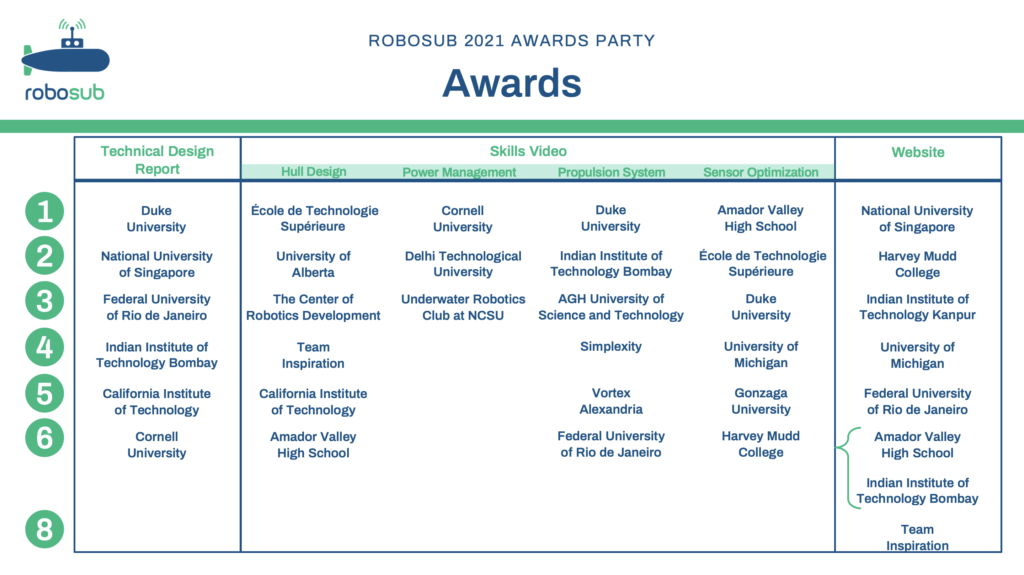
In the blink of an eye, the spring semester was over. Like last year, we held meetings throughout the summer to work on our virtual Robosub submissions. To document our year-long effort, we wrote a technical paper, shot two videos entries, and revamped our website. Here’s how we did in Robosub 2021, which featured 54 teams from 12 countries across the globe:
1st Place – Technical Design Report
1st Place – Propulsion System
3rd Place – Sensor Optimization
So proud of what we have achieved, but we’re just getting started. Duke Robotics has some big goals for Robosub 2022, so stay tuned for the fireworks to come!
We’ve come such a long way, and we certainly would not be here today were it not for the leadership and dedication of our outgoing seniors: Samuel Rabinowitz (ECE/CS), Eric Chang (ME/CS), Trevor Fowler (ME), and David Miron (ECE/CS). On behalf of everyone at Duke Robotics, a huge thank you for the countless hours, love, and guidance you’ve poured into the club over the past four years. You will all be dearly missed.



