With the school year starting back up, we decided to continue the electrical team’s onboarding project from the previous year and augment it with a new challenge. This year, our challenge for the teams was to create either the loudest sound or have the most creative use of sound using piezoelectric speakers. With roughly 30 people showing up, we had a successful onboarding session with the use of function generators, power supplies, Arduinos, and more.


After finishing onboarding, we started on projects and electrical team goals for this year in our following meeting. Most of the older members worked on researching the mini robot, including thinking about what computer to use, and they began to draw a wiring diagram. As for the new members, after we introduced them to the main stack, they split up into groups to work on systems of their interest. These teams primarily started out with brainstorming and researching products. These include a new kill switch that’s easier for divers to use, methods of adding the voltmeter taken off at competition back on the robot, and making a copy of the electrical stack on plywood.
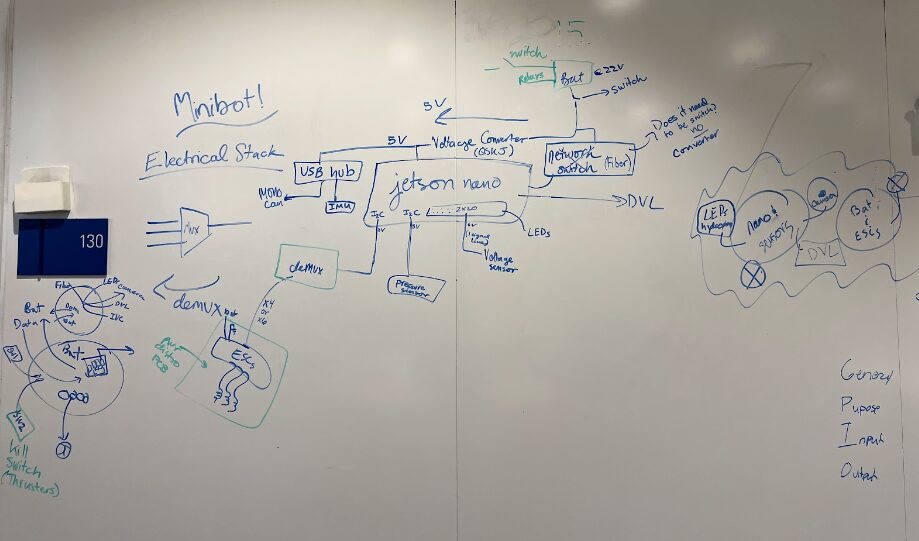
Now that these projects are in motion, we continued brainstorming and researching in Wilkinson for our 3rd meeting. We primarily focused on planning out the mini robot’s stack design and also researched products that would be helpful for the inter-vehicle communication (IVC). By the end of the meeting, the mini bot group fully drew out the stack diagram for the mini bot and compiled a general list of parts needed for its build. The IVC group spent the meeting researching underwater modems and other methods of communications between the 2 robots. These included morse code via pingers, signals via LED lights, and various other products. Quotes were requested for all of the purchasable products in hopes to have a device for high bitrate communication.
