Welcome back to the spring semester! I will be taking over the leadership of pool tests from Nathanael Ren, who is currently abroad for the semester. Due to Crush needing work with buoyancy blocks, we decided to start by just testing Oogway. We originally had also hoped to get some acoustics data at the pool; however, we were not able to place the necessary acoustics electronics in time for the test, so this was pushed back to a future test.
Tech Check
We started with a quick tech check for the new semester. Previously, there were reports that Oogway could no longer do an initial submerge or hold depth underwater, so this was our first priority for the first test of the semester. After placing the robot in the water, though, we found no emergent issues through our systems status UI panel, and so we proceeded to test the CS project code that was worked on last semester.
Sonar
After this, we started working on testing out the sonar, first testing it against the pool wall. After some debugging with our units and scaling, we were able to get the sonar to consistently detect the distance and angle from the wall. We hope that this will prove useful during competition runs, when we need to realign ourselves during our run.
Unfortunately, the sonar was having trouble detecting other objects, such as a buoy in the pool. We suspect that the sonar is picking up other, larger objects, such as the lane line adjacent to the buoy. By modifying our sweep parameters, we may be able to ensure the robot can pick up smaller yet closer objects instead.
Yaw to CV Object
In our code, we have an algorithm that uses computer vision to center an object in our robot’s camera frame. In theory, this allows us to progress to an object, correct our heading, and then continue heading towards the object. During the last semester, we worked on rewriting this algorithm to be smoother and more reliable.
We attempted some small-scale testing with the aforementioned buoy in the water. However, we suspect that due to the threshold of detection that the code accepts as accurate is too large. Due to this, the robot would almost always declare the algorithm complete whenever the object was anywhere in the frame. In addition, when the object is not in frame, the robot cannot consistently and smoothly yaw until it finds the object.
Due to the limited time at the pool, as well as some unfamiliarity with the new algorithm by the pool testing crew, we decided to revisit this testing at a future date.
Post-test Observations
When back at the robotics room, we took off the main electrical stack capsule as well as the battery capsule as usual. When doing so, we observed a sizeable pool of water at the bottom of the battery capsule. Luckily, due to the elevated battery holder in the capsule, the battery and its cables stayed relatively dry. However, this issue must be investigated and fixed before the next test, and observed before the robot attempts any barrel rolls to ensure that the capsule is dry.
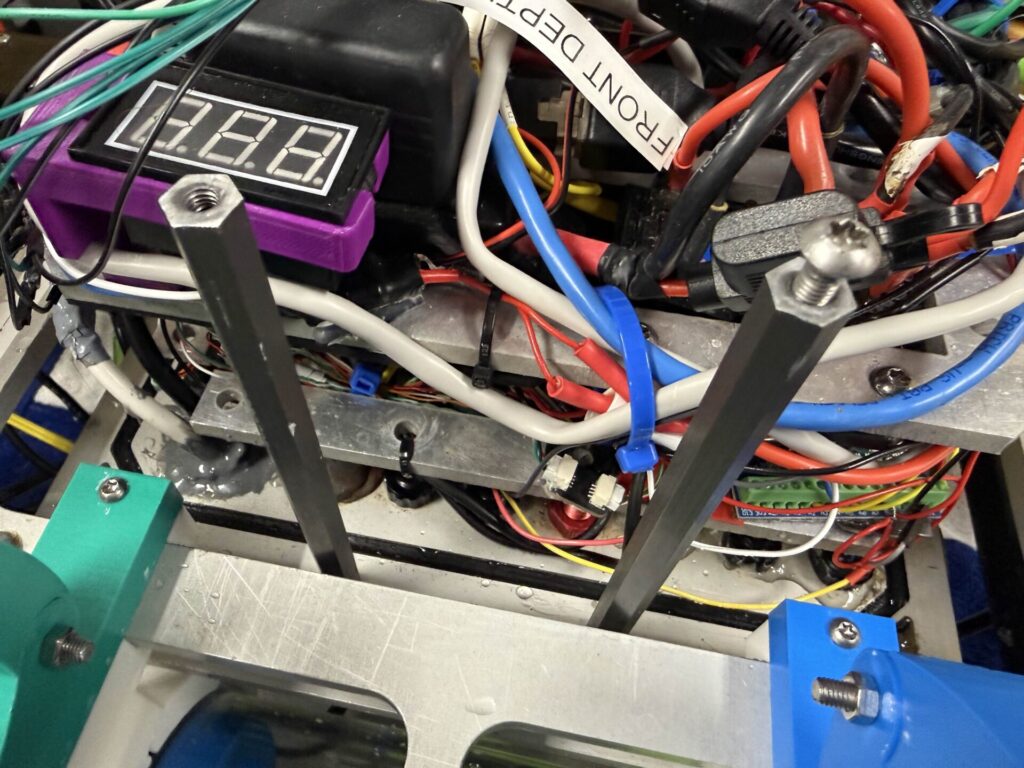
In addition, we also observed some water in the main electrical capsule, pooled around the corner on one side. There are images below that illustrate this, but we suspect that one or more of the bottom ports are not properly waterproofed or secured.

We hope to also see Crush at the next pool test, to try out the new 8 thruster setup underwater.