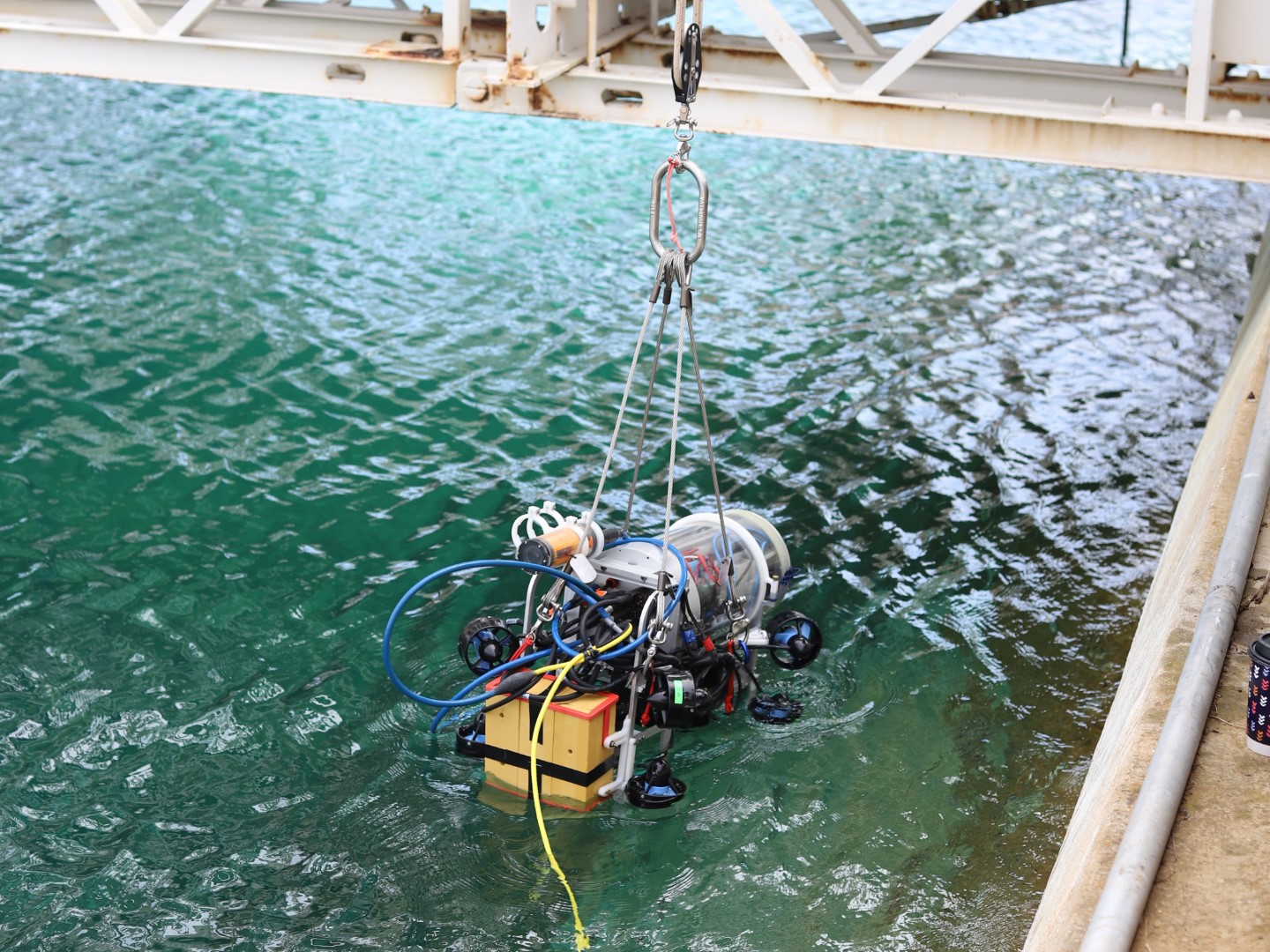
RoboSub ended a couple of weeks ago, and we had an absolute blast! Eleven of us flew to San Diego for nine days to get Cthulhu, our new robot, up and running in the TRANSDEC. (Click on “Cthulhu” to see our team video and journal paper.)
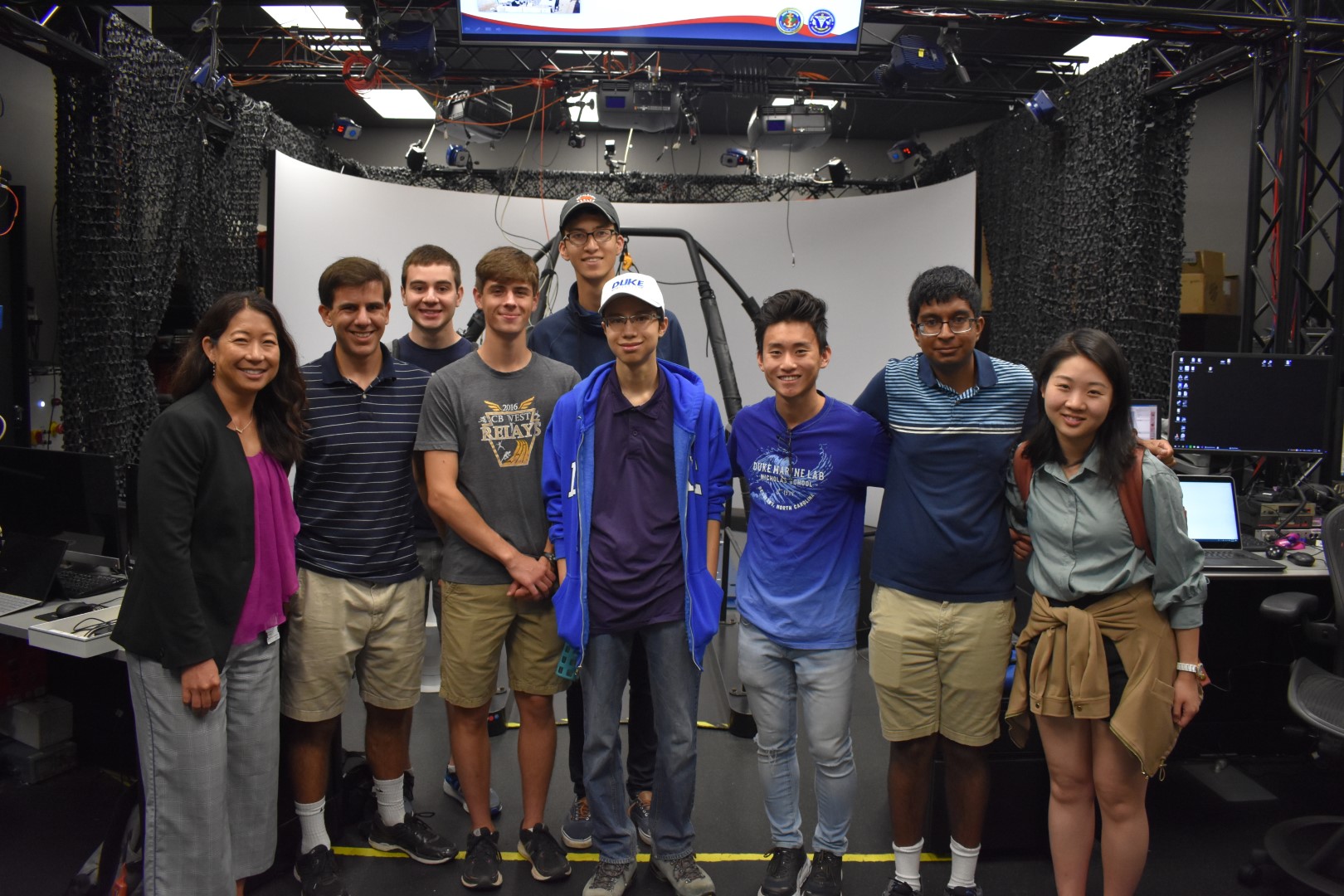
Above: Duke RoboSub 2019 team (from left): Samuel Rabinowitz, Neil Dhar, Eric Jiang, Nathaniel Brooke, Maverick Chung, Chris Wolff, Muthu Arivoli, Trevor Fowler, Estelle He, Eric Chang, David Miron
Click here for the full-size image.


How we fared
We qualified for semi-finals (only 38 teams did so) and placed 24th out of 59 teams, which, given the state we were in with our software heading into the week, is much better than we were expecting. Mechanically and electrically, we had a nearly problem-free robot, which is a big departure from our previous entry, Leviathan.
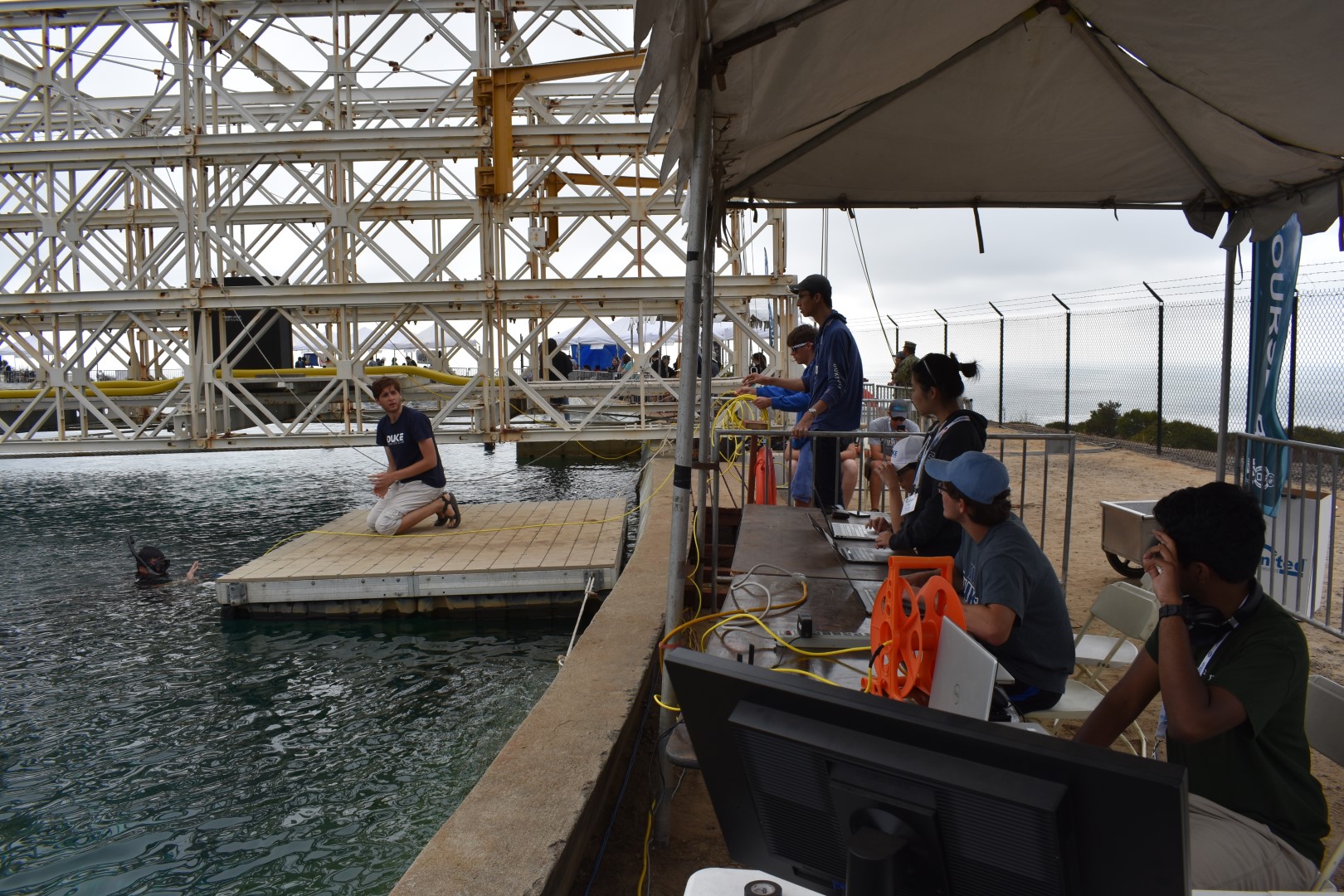
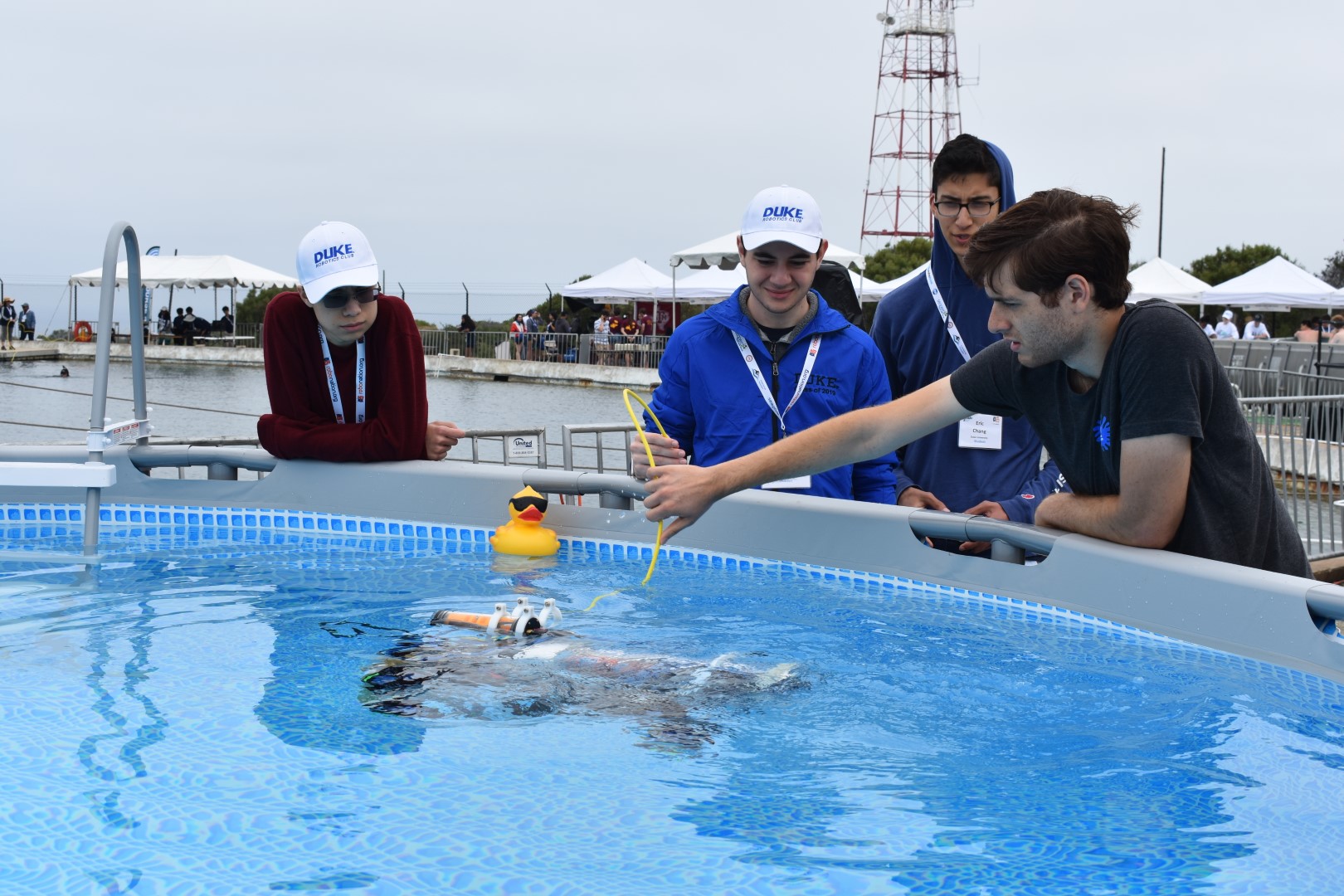
The first three days were practice and qualification days. On the second day, we passed through the qualification gate, earning us a spot in semi-finals on the fourth and fifth days. The team worked day and night to get Cthulhu ready for its semi-final runs. We used our practice runs to collect camera footage and acoustics data, useful for both the competition and the coming year. Our first semi-final run came just a little bit too early, so we quickly wrote a simple program to send the robot straight, just barely missing surfacing in the octagon. The next day, after working almost 24 hours straight, we had a much improved controls and task-planning system, so we were able to complete the following tasks:
- Passing through the qualification gate
- Maintaining a fixed heading while doing so
- Passing through the 40% section of the gate (demarcated by a hanging divider)
- Performing a 720° yaw rotation for style points
We also completed a search pattern to try to hit the buoys, but unfortunately, drift from water currents had taken us too close to the wall of the TRANSDEC, and we were unable to score any points for that task.


Subteam reports
Our three subsystem teams (subteams), mechanical, electrical, and computer science, had vastly different experiences at the competition.
Mechanical: At the competition, the robot was nearly problem-free from a mechanical standpoint. Trevor Fowler and I, as co-mechanical leads, improved on Leviathan, the team’s previous robot that had competed in 2016 and 2017. Leviathan’s shining mechanical innovation was reliability, so we kept the best elements of that on Cthulhu, such as a robust capsule sealing mechanism. We focused instead on simplifying and strengthening the rest of the design to allow for more modularity. We scored a decent number of bonus points by being significantly under penalty weight.
Electrical: The robot also had few electrical issues due to a simplifying and shrinking to two-thirds of the size of the electronics stack design internally, and better use of the waterproof connectors externally. Neil Dhar, our electronics lead, led a redesign of the stack that used more off-the-shelf components. Externally, the capsule was mounted to minimize unplugging and re-plugging of our wet-mate connectors, and heat shrink was used in place of epoxy potting. Our biggest point of electrical failure was allowing corrosion to occur through improper care of the Power-over-Ethernet eight-pin bulkheads, and having a tether with a finicky Ethernet crimping job. All in all, though, electrical was solid.
Computer Science: Cthulhu’s programming was our weakest point, and understandably so. David Miron, our computer science lead, had only been appointed to the role during second semester after some leadership restructuring, and was tasked with shifting from years of using a legacy, in-house codebase to learning and implementing Docker and Robot Operating System (ROS), all in the span of a few short months. As such, while we had basic planning functionality, we were adding new functionality each day at the competition, such as controls and localization integration, which would have ideally been done months earlier in a more calm environment. Computer Vision and Acoustics were similarly lacking until towards the end of the week. However, we persevered, and we are prepared to crush it in the Computer Science department this coming year.


Meeting other teams
Perhaps one of the most influential takeaways from the competition was connecting with and learning from other teams and their robots. We saw designs that run the whole gamut, from miniature to gargantuan, flat to long to tall to plus-shaped, and with a wide variety of electrical and programming solutions. We also got to know a few different teams fairly well. Our robot room in the hotel was next door to the team from The Ohio State University, so we met them on the first day and learned a lot from each other’s ‘bots. Other teams we got to know include BeaverAUV, Caltech, Berkeley, and Illinois.
The competition’s welcoming, rather than cutthroat, atmosphere took us by surprise. It was amazing to see the amount of inter-team teamwork at a competition. For example, The OSU’s team pioneered increased data-sharing amongst teams since there were so many teams needing to train their neural networks on camera footage. The mentality was that all of us were presented with an incredibly hard challenge, and while yes, we want to outperform our peers of other institutions, if we help each other get over those small barriers to entry such as lack of data or other basic robot tasks, then all of us can collectively raise the bar and make much more impressive and innovate robots. We plan to stay in touch with many of the teams we met ’round the TRANSDEC.


Meeting sponsors
RoboSub has a large variety of sponsors, most of whom set up tables around the TRANSDEC for teams to learn more about them and perhaps scout for internships and jobs.
It was especially cool to meet sponsors directly related to our club. There was Blue Robotics, whose inexpensive, powerful, and compact T200 thrusters were absolutely dominating the competition, with most teams’ robots sporting them, including ours. MathWorks, maker of MATLAB, and Dassault Systèmes, maker of SolidWorks, were both there as they provide sponsorships to RoboSub teams, including ours, to use their products for free. Teledyne, maker of many teams’ Doppler Velocity Loggers, including ours, was there. The representative actually remembered our team from the days of yore back in the early 2000s. Since all of his in-laws are Carolina fans, he took a picture with us decked out in our Duke gear to spite them, and their text response was hilarious.
There were also a range of other cool sponsors to meet, from government contracting giant Northrop Grumman to AUV startup Houston Mechatronics to space-exploring Blue Origin. Not to mention that we got some cool sponsored swag that we could use on our robot, such as SolidWorks zip ties, tinted safety glasses, and O-ring picks.
Meeting Duke alumni
Lastly, we reached out to and met some inspirational Duke alumni who had studied engineering in Pratt and are doing amazing things in San Diego. They got to visit us at the TRANSDEC, meet the team, see the competition and our robot, and we got to learn about their time at Duke and careers afterwards. Many of the alumni are involved with the Navy in some way since San Diego has the largest Navy base and highest military population density in the country, and the Navy has tons of jobs for engineers. Even the RoboSub competition is co-sponsored by the Navy (the TRANSDEC is a Navy facility).
We were also graciously invited for a tour of the PhyCORE lab at the Naval Health Research Center by Dr. Pinata Sessoms, Duke BME 1998, who directs the lab. Despite not being exactly robotics in focus, the tour actually opened up our eyes to ways that the two disciplines intersect, namely in the augmented reality and motion platform system realms to measure and train physical readiness of Navy Sailors and Marines, but also in monitoring human sleep with sensors. It was amazing to finally connect after initially talking with Dr. Sessoms about a tour over a year prior at her reunion on campus.
And how could I possibly talk about meeting alumni without mentioning meeting Logan Rooper. Logan graduated in 2017, and while at Duke, he essentially refounded the Duke RoboSub team, bringing us from a decent project-based club to focusing all of our efforts on a competition we had gone to years prior. He happened to be in San Diego on the first day we were there, so all of us, most of whom just finished freshmen and sophomore years and thus had not met him, got to show him what we have been working on and hear about his experience and advice he had.
We are so grateful for having had the opportunity to connect with such amazing alumni and learn about all of their amazing careers. To any of you out there reading this, let us know if you are in San Diego so we can meet up next summer, or let us know if you are around Duke and want to meet up during the school year. Contact us here!
All in all…
We had an amazing experience in San Diego, and we return to the next school year with many lessons and reinvigorated drive to innovate and improve to create our best team and robot yet!