Since our founding in 2001, the Duke Robotics Club has been designing AUVs for the RoboSub competition. Our early designs focused on mastering the basics of underwater navigation and control, incorporating simple sensor arrays and propulsion systems. Over the years, we have progressively integrated more advanced technologies, such as sophisticated computer vision, industry leading robotics frameworks, and state-of-the-art sonar systems. Each new iteration of our AUVs has built upon the lessons learned from previous models, resulting in more autonomous, efficient, and capable robots.
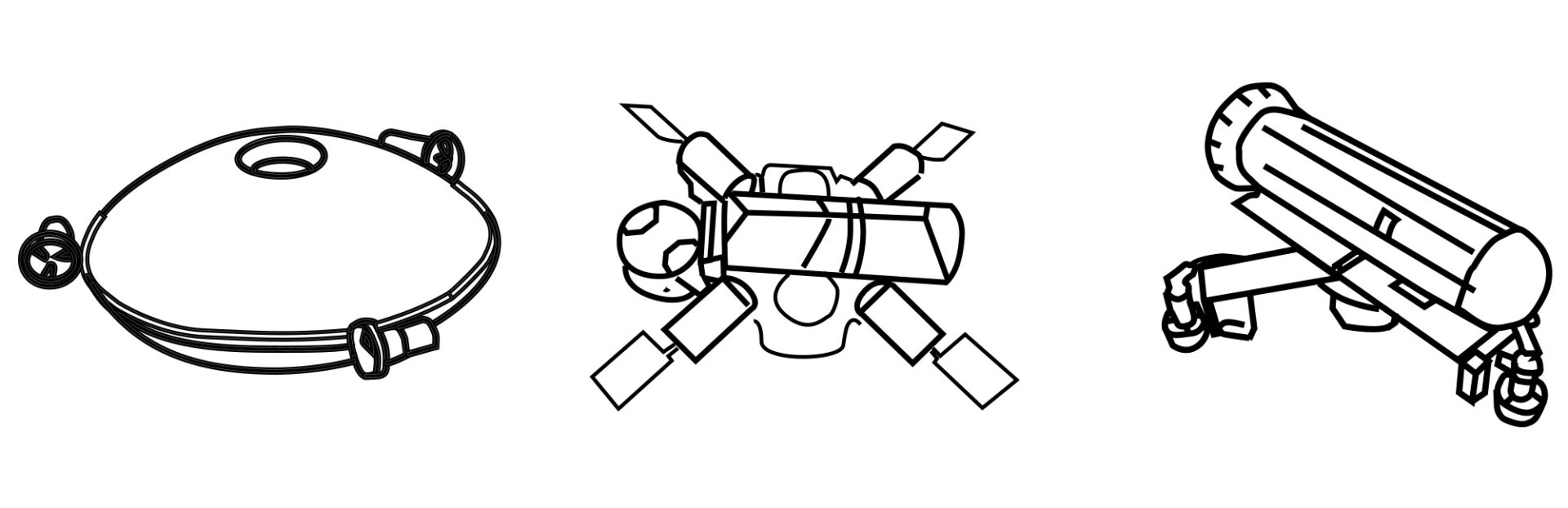
2001-2007: Gamera, Charybdis, Scylla
We went to RoboSub for the first time in 2001 with Gamera (middle), our first AUV. After three competitions with Gamera, we unveiled Charybdis (left), our second AUV. Another three competitions, and our third AUV, Scylla (right), arrived on the scene. We placed high almost every year. After the 2007 competition, our club transitioned into doing other projects for a few years before steering back to working on RoboSub in 2014. Check out our articles in Duke Today and in The Chronicle.
2016-2017: Leviathan
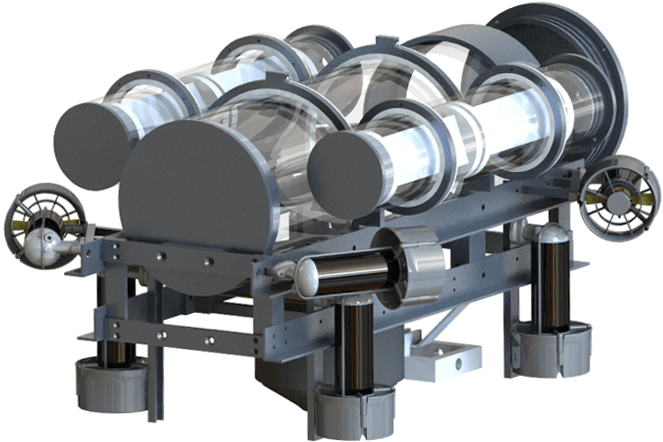
After two years of research and development, Leviathan was unveiled at RoboSub 2016. Check out our 2016 competition recap here.
During the 2016-17 academic year, we made several significant upgrades to our robot, including more advanced controls and computer vision, new marker droppers, upgraded cameras, and a lighter frame with only one pressure hull instead of three. We placed 11th at RoboSub 2017! Check out our article here in the DukEngineer magazine.
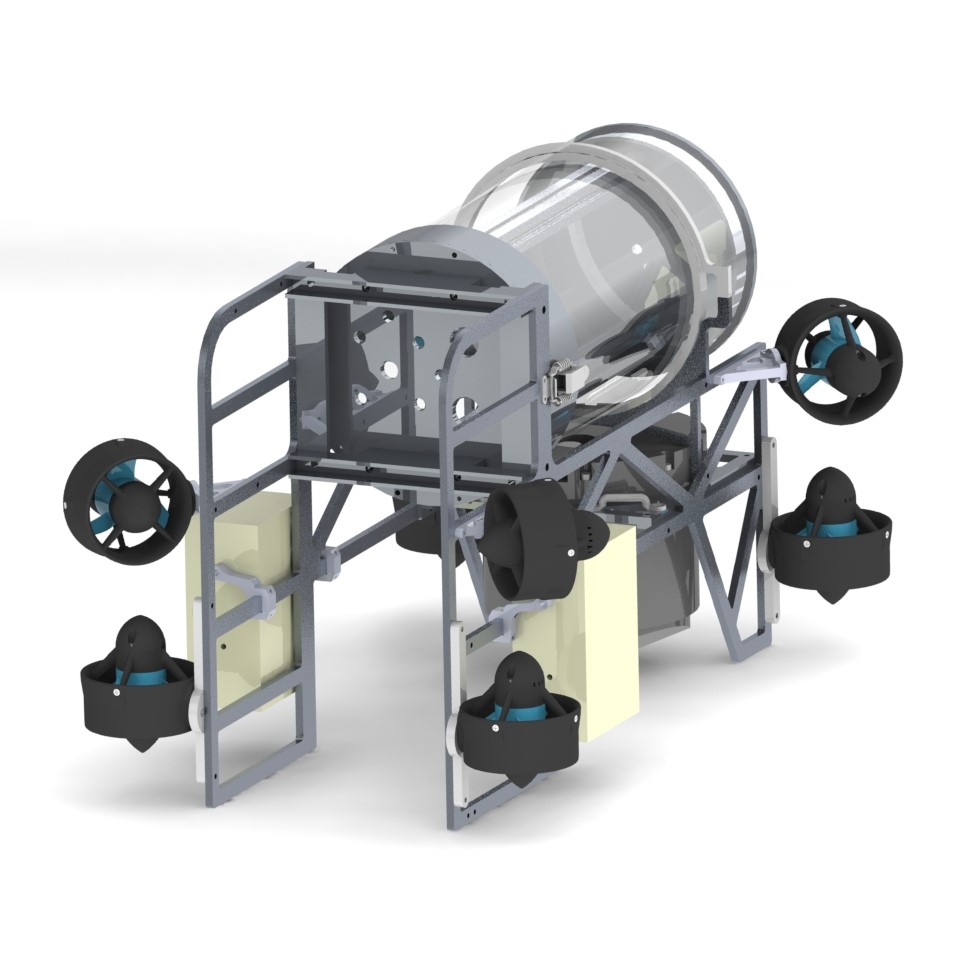
2019-2022: Cthulhu
Cthulhu advanced our capabilities by introducing stereo cameras, new thrusters, and a more modular frame – all on a robot only two-thirds the size of Leviathan. We also transitioned to a Docker and ROS software framework. We made semi-finals at RoboSub 2019. Check out our competition recap here on our blog.
We enlarged Cthulhu’s frame for additional space and better weight distribution, added an NVIDIA Jetson for sophisticated computer vision, and generalized our hardware and software to work well with future robots. At the virtual RoboSub 2020, our technical paper ranked 4th place and overall we ranked 8th place. Here’s the recap.
At the virtual RoboSub 2021, our technical paper and propulsion systems video ranked 1st place and our sensor optimization video ranked 3rd place. Here’s the recap.
At RoboSub 2022, we returned back to an in-person competition at the University of Maryland, where we made semi-finals and ranked 1st place for our technical paper and 12th place overall.